👋 Hi there, I'm Elsayed ...
Assistant lecturer @ ERU | Embedded software Engineer👾

I am an Egyptian Mechatronics and Robotics Engineer, who is currently working as an Assistant Lecturer at the Faculty of Engineering, Egyptian Russian University (ERU). I have a strong interest in the control of robotic systems, especially soft robotics, which are robots made of flexible and deformable materials that can adapt to complex environments and tasks.
In 2012, I enrolled in the Mechatronics and Robotics Engineering program at the Faculty of Engineering (ERU), where I received my B.Sc. degree with High Honors in 2017. My bachelor’s thesis focused on the control of a 6 DOF robotic arm, which I designed and built using Arduino and MATLAB. I also completed several courses and projects in various fields of Mechatronics and Robotics, such as embedded systems, artificial intelligence, machine vision, and human-robot interaction.
In 2020, I joined the Mechatronics Department at Ain Shams University (ASU) as a M.Sc. student, where I worked under the supervision of Prof. Dr. Mohamed Ibrahim Awad. My research was focused on modeling and controlling a soft robotic arm, which I fabricated using silicone rubber and pneumatic actuators. I developed a novel mathematical model and a robust controller for the soft robotic arm, which I validated through simulations and experiments. I also applied my soft robotic arm to different tasks, such as grasping, manipulation, and locomotion. I published my research results in several peer-reviewed journals, such as the Journal of Intelligent & Robotic Systems, Scientific Reports, and ERU journal. I received my M.Sc. degree in October 2023, with a grade of Excellent.
My future plans include pursuing a Ph.D. degree in Mechatronics and Robotics Engineering, where I hope to continue my research on soft robotics and explore new applications and challenges in this emerging field. I also aim to contribute to the development and innovation of Mechatronics and Robotics in Egypt and the world, through education, research, and industry collaboration.

“Scene at ain shams university”
“The master's thesis defending”
WELCOME TO MY WEBPAGE
Discover a world of innovation and technology. Dive into the latest projects, insights, and tutorials designed to help you stay ahead in the field of embedded systems and robotics. Join me on a journey of learning and exploration.
AREAS OF INTEREST
Soft Robotic Manipulator
Designing several soft continuum robot manipulators with varying specifications and applications
Controllers & Control Theory
Constructing and configuring several controllers based on various control algorithms to precisely control the (HRCM)

Embedded system Engineering
Mastering controller software development, from foundational files to startup code, is key to building efficient systems.
Publications
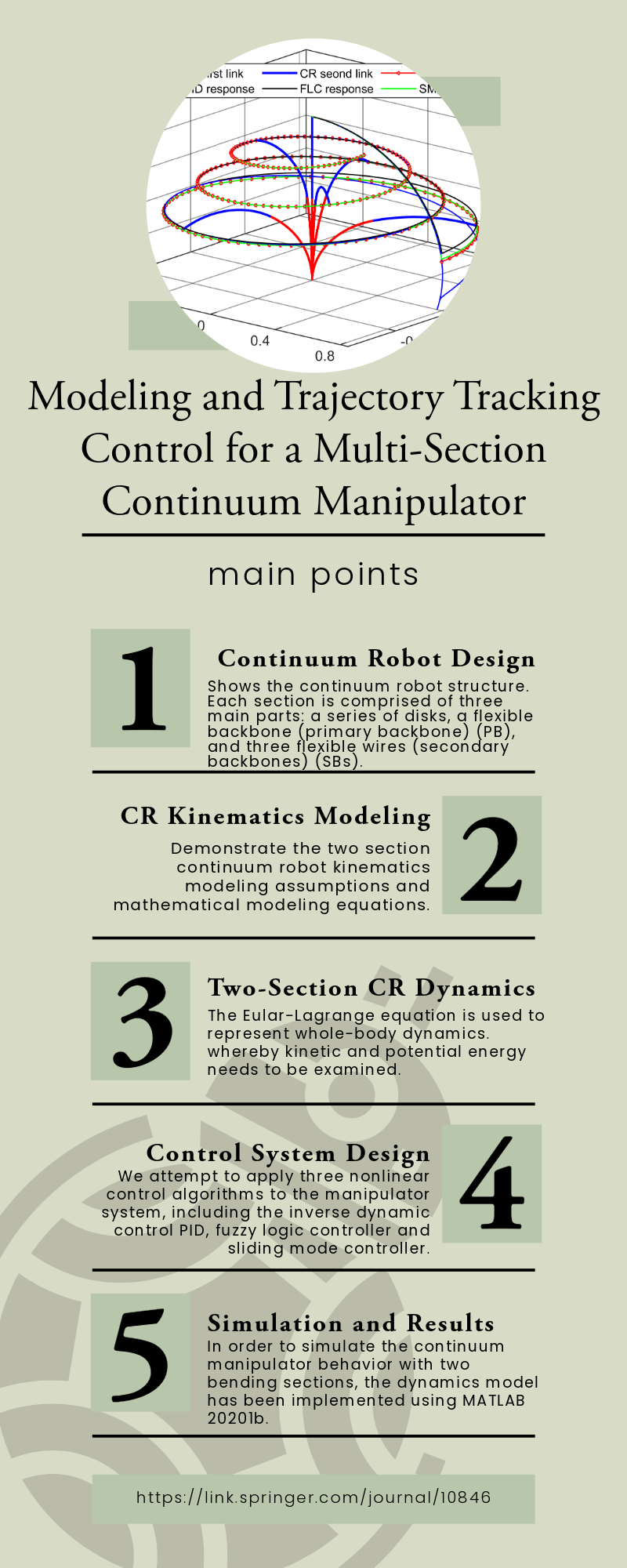

Modeling and Trajectory Tracking Control for a Multi-Section Continuum Manipulator
Journal of Intelligent & Robotic Systems
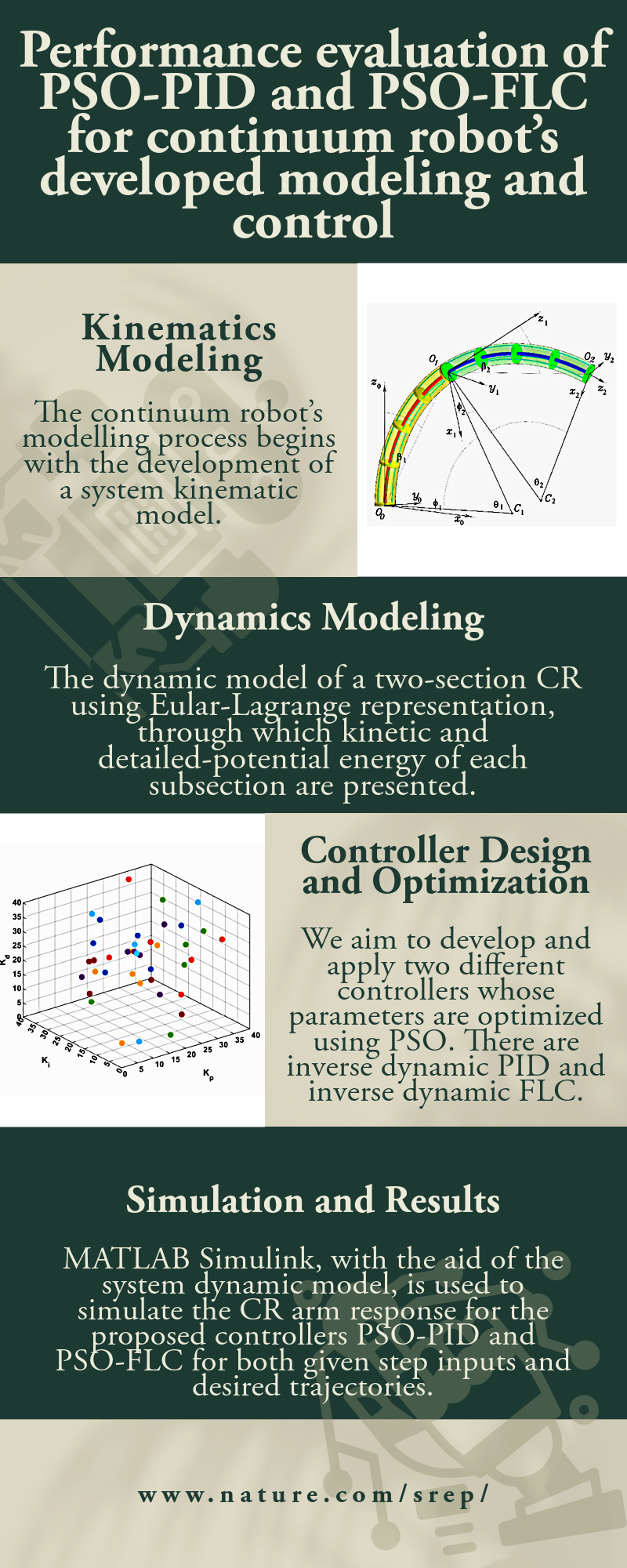

Performance evaluation of PSO-PID and PSO-FLC for continuum robot’s developed modeling and control
Scientific Reports
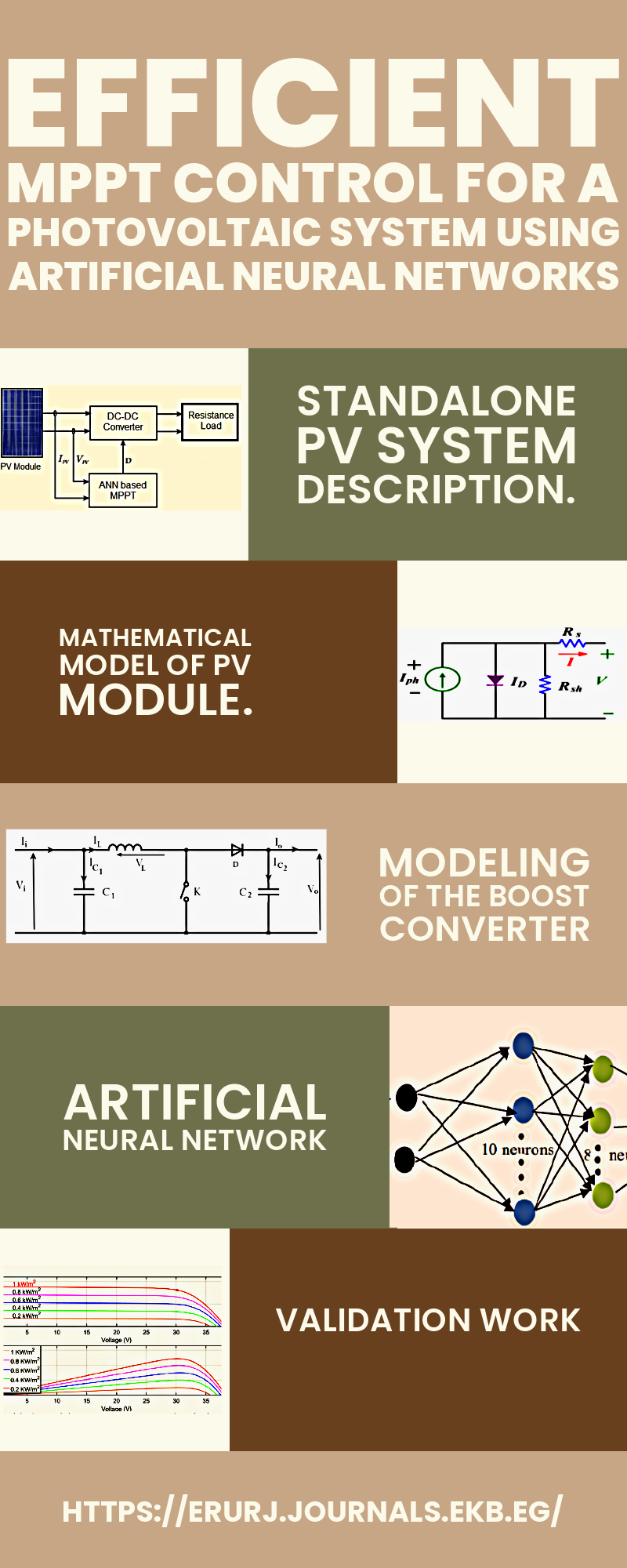

Efficient MPPT control for a photovoltaic system using artificial neural networks
ERU Research Journal
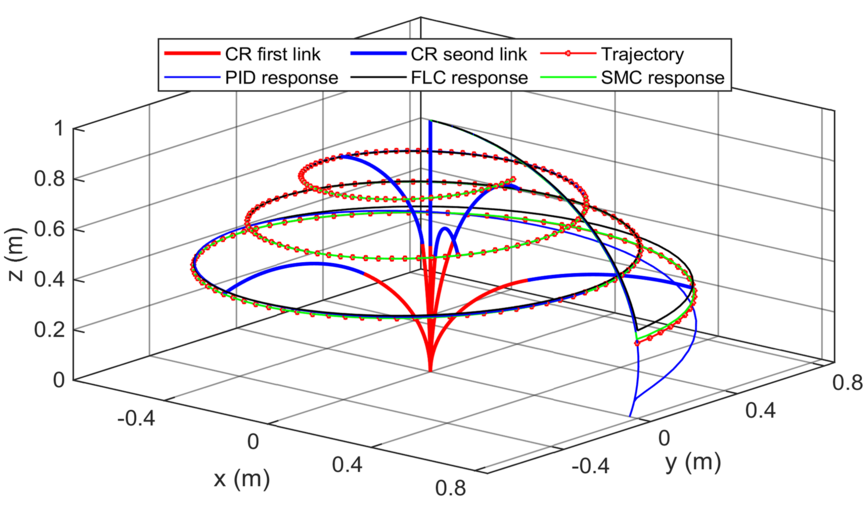
Validating the developed system dynamic model using multiple designed trajectory
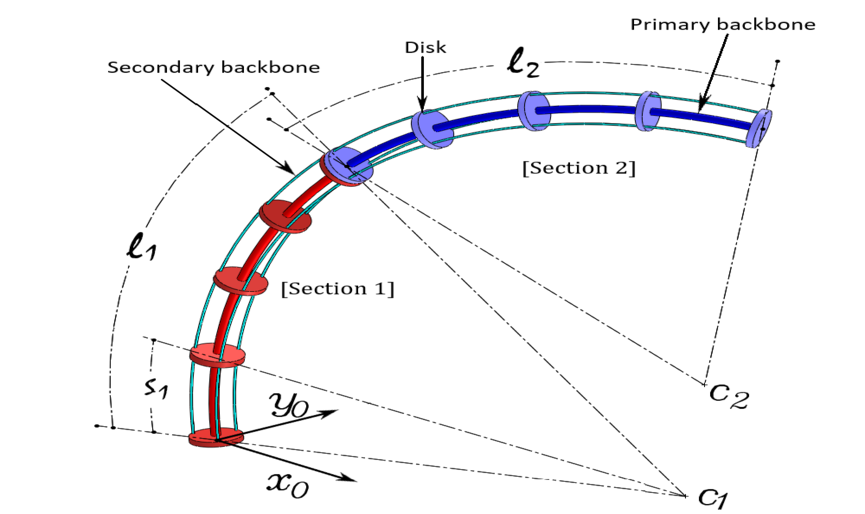
Designing hyper-redundant continuum robotic manipulator, actuated using tendon wires
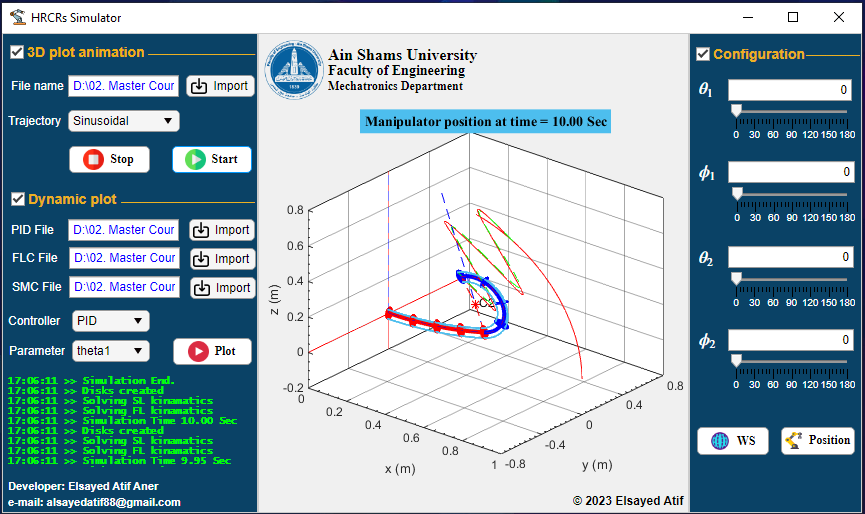
Developing and designing animated simulation for the whole HRCM body, through multiple designed trajectory